-
Leon Zhang sales consultant
-
Email: zxl635973785@gmail.com
-
Phone/WhatsApp: +86 13655813266






Motor differential protection 87M
Overview
The motor differential protection device adopts professional differential motor protection logic. It is an integrated protection and control unit developed for high- and low-voltage asynchronous motors, available for standalone panel installation or built-in mounting in switchgear cabinets.
Product Functions (ANSI)
87/87M/50/51/49/48/46/50N/59/59N/27/81O/81U/60
Communication Mode
Optional: RS-485, CAN bus, Ethernet, IEC 60870-5-103 (IEC-103), IEC 61850
In-house Factory & Technical Team, OEM ODM Custom Electrical Equipment
Send your requirements, we will quote for you within 12 hours
Description
Overview
- The motor differential protection device adopts professional differential motor protection logic. It is an integrated protection and control unit developed for high- and low-voltage asynchronous motors, available for standalone panel installation or built-in mounting in switchgear cabinets.
Product Functions (ANSI)
- Differential Instantaneous Overcurrent Protection (ANSI 87)
- Percentage Bias Differential Protection (ANSI 87M)
- Stage 1 Instantaneous Overcurrent Protection (ANSI 50)
- Stage 2 Definite Time Overcurrent Protection (ANSI 51)
- Stage 3 Definite Time Overcurrent Protection (ANSI 51)
- Inverse Time Overcurrent Protection (ANSI 51)
- Overload Protection (ANSI 49)
- Thermal Overload Protection (ANSI 49)
- Locked Rotor Protection (ANSI 48)
- Long Start-up Time Protection (ANSI 48)
- Motor Start Blocking
- Stage 1 Negative Sequence Overcurrent Protection (ANSI 46)
- Stage 2 Negative Sequence Overcurrent Protection (ANSI 46)
- Negative Sequence Inverse Time Overcurrent Protection (ANSI 46)
- Zero Sequence Overcurrent Protection (ANSI 50N / 51N)
- Overvoltage Protection (ANSI 59)
- Undervoltage Protection (ANSI 27)
- Zero Sequence Overvoltage Protection (ANSI 59N)
- Overfrequency Protection (ANSI 81O)
- Underfrequency Protection (ANSI 81U)
- PT Circuit Break Detection (ANSI 60)
- PT Voltage Loss Protection (ANSI 60)
- Control Circuit Break Alarm
- System Power Loss Alarm
- Non-electrical Protection
Measurement and Control Functions
-
Category No. Parameter Specification Electrical Measurement Parameters 1 Bus Voltage Ua, Ub, Uc, Uab, Ubc, Uca 2 Measured Current Ia, Ic 3 Power Active Power P, Reactive Power Q, Power Factor COSφ 4 Frequency f 5 Electric Energy EP+, EP-, EQ+, EQ- Binary Input 6 Active Binary Input Channels 21 channels; input voltage options: AC/DC 220V, DC 100V, DC 48V (to be specified when ordering) Binary Output 7 Protection Output Channels 11 channels 8 Signal Output Channels 2 channels 9 Closing Position Signal Output Channel 1 channel 10 Device Power Loss Output Channel 1 channel
Communication Functions
| Item | Description |
|---|---|
| Communication Interfaces | 1 × Ethernet port
2 × RS-485 ports (the second RS-485 port shares the time synchronization port; function selectable via configuration) |
| Communication Protocols | IEC 60870-5-103, IEC 61850 (Ethernet), MODBUS RTU |
| Time Synchronization | Communication message synchronization, SNTP, IRIG-B |
Motor Protection Relay setting calculation excel
| No. | Setting Name | Setting Range | Unit | Default Value | Remarks |
|---|---|---|---|---|---|
| 1 | Differential Starting Current Setting | 0.1~100 | A | 1 | |
| 2 | Differential Instantaneous Overcurrent Setting | 0.1~100 | A | 5 | |
| 3 | Inflection Point Setting | 0.1~100 | A | 1 | |
| 4 | Percentage Bias Coefficient | 0.1~0.9 | — | 0.5 | |
| 5 | Motor Rated Current | 0.1~100 | A | 5 | |
| 6 | Motor Starting Time | 0~600 | S | 5 | |
| 7 | Stage I Overcurrent Setting | 0.1~100 | A | 8 | |
| 8 | Stage II Overcurrent Setting | 0.1~100 | A | 7 | |
| 9 | Stage II Overcurrent Time Delay | 0~100 | S | 0.5 | |
| 10 | Stage III Overcurrent Setting | 0.1~100 | A | 5 | |
| 11 | Stage III Overcurrent Time Delay | 0~100 | S | 1 | |
| 12 | Inverse Time Overcurrent Setting | 0.1~100 | A | 5 | |
| 13 | Inverse Time Overcurrent Delay | 0~100 | S | 1 | |
| 14 | Inverse Time Overcurrent Type | 0~3 | — | 1 | 1=Normal, 2=Very, 3=Extreme |
| 15 | Overload Setting | 0.1~100 | A | 5 | |
| 16 | Overload Time Delay | 0~100 | S | 2 | |
| 17 | Overload Protection Type | 0~2 | — | 1 | 0=Disabled, 1=Trip, 2=Alarm |
| 18 | Locked Rotor Protection Setting | 0.1~100 | A | 2 | |
| 19 | Locked Rotor Protection Delay | 0~100 | S | 1 | |
| 20 | Negative Sequence Stage I Overcurrent Setting | 0.1~100 | A | 2 | |
| 21 | Negative Sequence Stage I Overcurrent Delay | 0~100 | S | 1 | |
| 22 | Negative Sequence Stage II Overcurrent Setting | 0.1~100 | A | 1 | |
| 23 | Negative Sequence Stage II Overcurrent Delay | 0~100 | S | 2 | |
| 24 | Negative Sequence Stage II Protection Type | 0~2 | — | 1 | 0=Disabled, 1=Trip, 2=Alarm |
| 25 | Zero Sequence Overcurrent Setting | 0.1~100 | A | 2 | |
| 26 | Zero Sequence Overcurrent Time Delay | 0~100 | S | 2 | |
| 27 | Zero Sequence Overcurrent Protection Type | 0~2 | — | 1 | 0=Disabled, 1=Trip, 2=Alarm |
| 28 | Negative Sequence Current Thermal Coefficient | 2~10 | — | 6 | Default: 6 |
| 29 | Thermal Time Constant | 0.01~100 | min | 5 | |
| 30 | Heat Dissipation Time Constant | 1~5 | Times | 5 | Normally 1~5 times of thermal time constant |
| 31 | Overheating Alarm Level | 10%~100% | — | 80% | |
| 32 | Long Starting Time Setting | 0.1~100 | A | 5 | |
| 33 | Long Starting Time Enable Duration | 0~100 | S | 3 | |
| 34 | Start Interval Time Setting | 0~100 | min | 10 | |
| 35 | Undervoltage Block Starting Setting | 1~400 | V | 70 | |
| 36 | Overvoltage Setting | 1~600 | V | 120 | |
| 37 | Overvoltage Time Delay | 0~100 | S | 0.5 | |
| 38 | Undervoltage Setting | 1~400 | V | 80 | |
| 39 | Undervoltage Time Delay | 0~100 | S | 1 | |
| 40 | Zero Sequence Overvoltage Setting | 1~400 | V | 30 | |
| 41 | Zero Sequence Overvoltage Time Delay | 0~100 | S | 0.5 | |
| 42 | Zero Sequence Overvoltage Protection Type | 0~2 | — | 1 | 0=Disabled, 1=Trip, 2=Alarm |
| 43 | Overfrequency Setting | 35~60 | Hz | 49 | |
| 44 | Overfrequency Time Delay | 0~100 | S | 0.5 | |
| 45 | Underfrequency Protection Setting | 35.0~65 | Hz | 51 | |
| 46 | Underfrequency Time Delay | 0~100 | S | 0.5 | |
| 47 | Undervoltage Block Frequency Setting | 1~400 | V | 20 | |
| 48 | Slip Block Frequency Setting | 1~30 | Hz/S | 3 | |
| 49 | PT Circuit Break Time Delay | 0~100 | S | 5 | |
| 50 | PT Voltage Loss Time Delay | 0~100 | S | 5 | |
| 51 | Control Circuit Break Time Delay | 0~100 | S | 10 | |
| 52 | System Power Loss Type | 0~2 | — | 1 | 0=Disabled, 1=Trip, 2=Alarm |
| 53 | High Temperature Alarm Delay | 0~100 | S | 0.1 | |
| 54 | High Temperature Trip Delay | 0~100 | S | 0.1 | |
| 55 | Non-electrical Protection 1 Type | 0~2 | — | 1 | 0=Disabled, 1=Trip, 2=Alarm |
| 56 | Non-electrical Protection 1 Time Delay | 0~100 | S | 0.1 | |
| 57 | Non-electrical Protection 2 Type | 0~2 | — | 1 | 0=Disabled, 1=Trip, 2=Alarm |
| 58 | Non-electrical Protection 2 Time Delay | 0~100 | S | 0.1 |
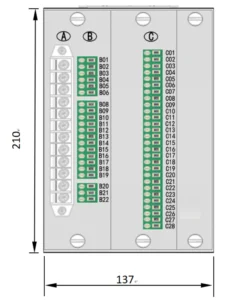
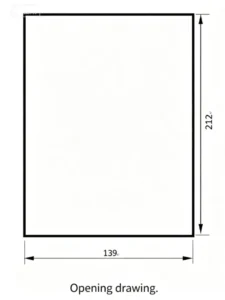
Outline and Installation Dimensions


FAQ
Q:What types of motors require differential protection?
A:motor differential protection scheme
Motors of 2000 kW and above shall be equipped with differential protection. For motors below 2000 kW, differential protection is required if instantaneous current protection lacks sufficient sensitivity.
High-voltage motors for critical special applications (such as mine main drives and main ventilation) must be fitted with differential protection to ensure safe, reliable operation and avoid major losses and incidents.
Critical six-lead motors below 2000 kW shall also use differential protection as main protection for internal short circuits, when instantaneous protection cannot meet sensitivity requirements.
Q:What is the CT wiring configuration for motor differential protection?
For standard motors, the polarity end of CT (T/P marked terminal) must face the busbar or transformer side to ensure correct secondary current direction.
In motor differential protection CT connection, the wiring of differential protection of motor shall strictly follow A-A, B-B and C-C phase matching.
For units adopting motor differential protection self balancing, it is required to configure motor differential protection core balance CT and zero-sequence balance CT; please refer to the official wiring diagram for specific connection methods.
Q: ANSI code for motor differential protection?
A: ANSI standard code is 87M.
Q: Main protected faults?
A: Stator phase short-circuit, winding earth fault and inter-turn short circuit.
2 reviews for Motor differential protection 87M
Related products



High Quality
Stable performance, reliable design, ensuring safe operation for power system protection and grid stability.
Fast Delivery
Timely delivery to support your urgent orders and project schedules efficiently and professionally at any time.
Best Warranty
Professional Warranty: Reliable after-sales support for stable relay protection and long-term customer satisfaction.
xiao zhang –
This motor differential relay (ANSI 87M) serves as main protection for medium-high voltage motors. It compares currents from motor terminal and neutral CTs, features high sensitivity against stator short-circuit and earth faults, with CT broken blocking to avoid misoperation. Multiple communication options are available for industrial and power station projects worldwide.
Jack –
Low burden on CTs and PTs — doesn’t affect measurement accuracy.