-
Leon Zhang sales consultant
-
Email: zxl635973785@gmail.com
-
Phone/WhatsApp: +86 13655813266

6KV/10KV Motor Protection Relay Function
Intelligent motor protection relays, also known as electric motor protection relays, provide vital motor protection functions. When abnormal conditions including overload, phase loss, locked rotor, short circuit, overvoltage, undervoltage, earth leakage, three-phase imbalance, overheating, bearing wear and stator-rotor eccentricity occur during motor operation, these relays automatically trigger alarms and perform protection actions, which serve as a critical safeguard for the safe operation of motors.

Instantaneous Overcurrent Protection
Protects against phase-to-phase short circuits in motor stator windings. Generally applied to motors below 2000 kW and acts to trip.
Longitudinal Differential Protection
Used for motors of 2000 kW and above, or for motors below 2000 kW where the sensitivity of instantaneous overcurrent protection is insufficient. It protects against phase-to-phase short circuits inside the motor and on its outgoing lines, acting to trip.
motor overload protection relay
Prevents overcurrent caused by overloading of the driven machinery. It acts to send an alarm or trip after a preset time delay.
Single-Phase Earth Fault Protection
In low-resistance earthed systems, single-phase earth fault protection must be installed when the earth fault current exceeds 5 A to mitigate hazards from stator winding earth faults. It sends an alarm for earth currents of 5–10 A and trips for currents above 10 A. After a single-phase earth fault on a high-voltage motor, tripping is not always necessary, as a simple earth fault does not disrupt normal operation (though leakage protection is lost). However, the motor must not be restarted if internal arcing occurs, to ensure safety and prevent burnout.
Undervoltage Protection
Prevents motor auto-restarting during voltage drops or interruptions. It acts to trip and can be optionally installed.
Rotor Locked-Rotor Protection
Protects the motor during operation. If the rotor becomes locked due to excessive load, the protection quickly shuts down the motor to avoid or reduce damage to the drive, bearings, and other components. This function is automatically enabled after motor startup completes.
Locked-rotor protection provides two independent definite-time overcurrent elements, each individually adjustable. The positive-sequence current after startup is compared with the set starting threshold. If the current exceeds the threshold, a start signal is issued. After the set time delay, if rotor lock is still detected, a trip signal is activated. For positive-sequence current >0.2 In, the reset value is approximately 95% of the starting threshold.
Under-current Protection
Activates when all three-phase currents of a forced-air-cooled motor drop below the set threshold. It issues an alarm after a preset delay, warning of fan failure.
Negative-Sequence Overcurrent Protection
Detects negative-sequence currents caused by asymmetrical faults or unbalanced loads. Negative-sequence current induces a reverse magnetic field, generating double-frequency rotor current, eddy currents, and severe overheating at rotor ends and slot edges. Exceeding the motor’s negative-sequence current capability risks rotor burnout. This protection offers two definite-time stages and one inverse-time stage, all independently adjustable, with selectable analog input from protection CTs or metering CTs.
Motor Starting Supervision
Protects the motor during startup and complements thermal overload protection by preventing excessively long starting times. If startup is prolonged by voltage sag, overload torque, rotor blockage, etc., the device trips.
At energization, the motor draws an inrush current. Starting supervision identifies the startup state based on current changes:
- Start criterion: Maximum phase current rises from zero to 0.1 In within 20 ms.
- Reset criterion: Maximum phase current remains below 1.1 In for 40 consecutive ms.
Motor Restart Inhibition
Repeated startups risk rotor overheating due to high inrush current and low rotor thermal time constant (stator is less vulnerable). To prevent tripping from frequent startups, restart is blocked if rotor temperature exceeds its thermal limit during startup. A blocking signal is sent to a digital output contact in the starting circuit.
This function acts during startup of a stationary motor. The motor is considered stationary when three-phase currents fall below the breaker-on current threshold, and restart is detected when any phase current exceeds this threshold. The threshold should be set below the no-load current.
Motor Out-of-Synchronism Protection
Designed for synchronous motors. Loss or insufficiency of excitation causes loss of synchronism and abnormal changes in current, voltage, and power factor. Out-of-synchronism protection detects these variations to safeguard the motor.
It normally includes out-of-step protection and under-excitation protection:
- Out-of-step protection: Detects loss of synchronism and trips to prevent operation in an asynchronous state.
- Under-excitation protection: Monitors excitation level, issuing an alarm or tripping to avoid damage from insufficient excitation.
motor thermal protection relay
Monitors motor temperature via sensors. Prolonged operation or heavy overload raises temperature; exceeding the setpoint triggers an alarm or trip to prevent burnout. It can coordinate with other protections (e.g., earth fault protection) to form a complete safety system.
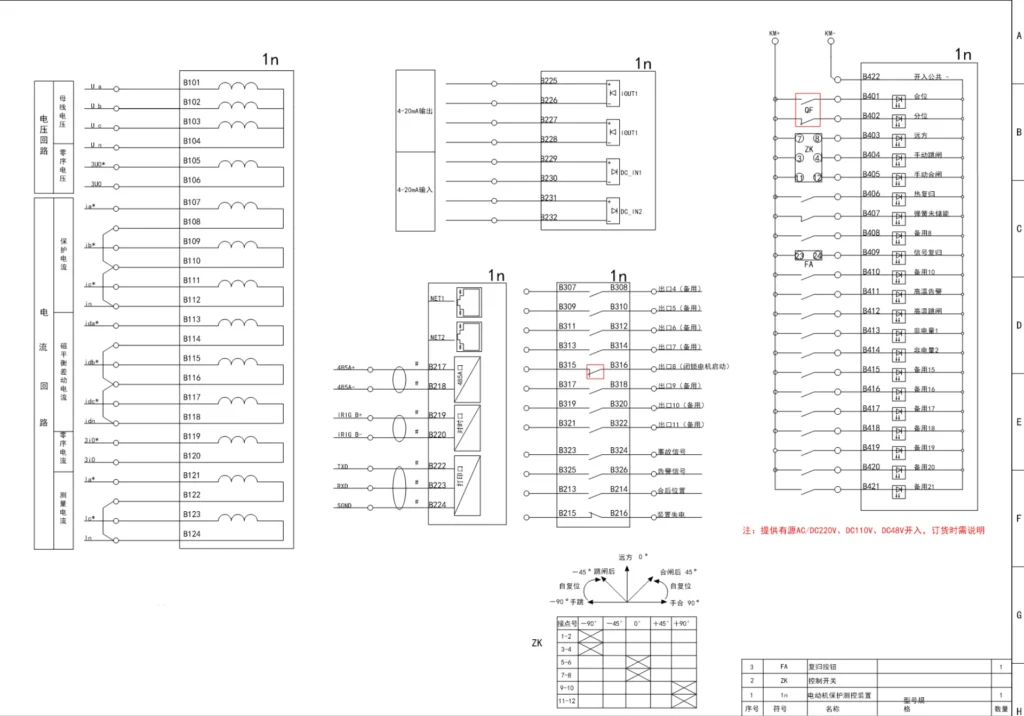
motor protection relay wiring diagram
Summary:Motor Protection Functions
Microprocessor-based medium voltage motor protection relays provide comprehensive motor protection, including instantaneous overcurrent, longitudinal differential, overload, single-phase earth fault, undervoltage, locked-rotor, under-current, negative-sequence overcurrent, starting supervision, restart inhibition, out-of-synchronism, and overheating protection. These functions effectively detect and handle faults and anomalies, ensuring safe and stable motor operation.



About Author

Hello, I'm Leno Zhang. I have 15 years of experience in the power relay protection industry with extensive pre-sales and after-sales project experience. Our company specializes in various complete sets of relay protection and automation equipment. I can assist customers in solving all practical on-site project challenges and provide optimal integrated solutions.
Tell Us Your Requirement
High Quality
Stable performance, reliable design, ensuring safe operation for power system protection and grid stability.
Fast Delivery
Timely delivery to support your urgent orders and project schedules efficiently and professionally at any time.
Best Warranty
Professional Warranty: Reliable after-sales support for stable relay protection and long-term customer satisfaction.